工业机器人就业培训中心

客服热线:8:00~20:00
136-9356-7579
器人常规型号: 【IRB1400】 【IRB2400】 【IRB4400】 【IRB6400】
IRB指ABB标准机器人
第一位数(1,2,4,6)指机器人大小
第二位数(4)指机器人属于S4以后的系统。
无论何种型号机器人,都表示机器人本体特性,适用于任何机器人控制系统。

IRB1400工作范围较小,最大承载5kg,常用于焊接与小范围搬运。
IRB2400 工作范围较小,最大承载16kg, 常用于焊接、涂刷、搬运与切割。
IRB4400 工作范围较大,最大承载60kg, 常用于搬运。
IRB6400 工作范围较大,最大承载200kg, 常用于搬运与点焊。
IRB6400R IRB6400升级版,1999年开始生产,2000年后全面替代IRB6400。
IRB640 工作范围较大,最大承载160kg,堆垛专用的四轴机器。
RB140 工作范围很小,最大承载为5kg, 常用于焊接。
IRB840 工作范围很大,最大承载1200kg,搬运专用龙门架机器人。
IRB340 最大承载为1kg,分拣专用机器人。
abb机器人组成部分
一、机械手(Manipulator)
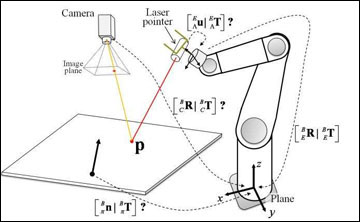
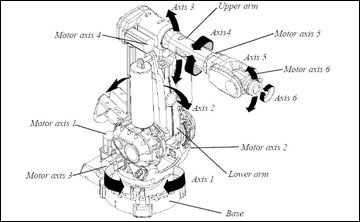
1.机械手是由六个转轴组成的空间六杆开链机构,理论上可达到运动范围内空间任何一点。
2. 六个转轴均有AC伺服电机驱动,每个电机后均有编码器。
3.每个转轴均带有一个齿轮箱,机械手运动精度(综合)达正负0.05mm至正 负0.2mm。
4.机械手带有手动松闸按钮,用于维修时使用。
5.机械手带有平衡气缸或弹簧。
6.机械手带有串口测量板(SMB),测量板带有六节可充电的镍铬电池,起保存数据作用。
二、控制柜(Controller)
控制柜外部
【Mains Switch: 主电源开关】 【Teach Pendant: 示教器】 【Operator’s Panel: 操作面板】 【Disk drive: 磁盘驱动器】
控制柜控制系统
【Robot computer board: 机器人计算机板,控制运动与输入/输出通讯。】
【Memory board: 存贮板,增加额外的内存。】
【Main computer board:主计算机板,含8M 内存, 控制整个系统。】
【Optional boards: 选项板插槽。】
【Communication boards:通讯板,用于网络或现场总线通讯。】
控制柜驱动系统
【DC link:将三相交流电转换为三相直流电。】【Drive module : 每个单元控制2-3根转轴的转距。】
控制柜电源系统
【Transformer: 进电变压器。】【 Supply unit:直流供电单元,整流输出电压及短路保护。】
三、其他主要部件
【Lithium batteries: 锂电池,存贮备用电源。】【 Panel unit:系统安全面板单元,处理所有影响安全与操作的信号。 】【I/O units : 输入/输出单元。】
工业机器人培训中心培训2-6个月毕业后保证就业
咨询电话:13693567579
 工业机器人技术操作培训课程
工业机器人技术操作培训课程
培训周期:2月;培训费用:10000元
学员毕业后初期年薪5-6万元左右
 工业机器人电气工程师培训课程
工业机器人电气工程师培训课程
培训周期:3月;培训费用:14000元
学员毕业后初期年薪7-8万元左右
 工业机器人机械工程师培训课程
工业机器人机械工程师培训课程
培训周期:3月;培训费用:15600元
学员毕业后初期年薪7-8万元左右
 工业机器人高级工程师培训课程
工业机器人高级工程师培训课程
培训周期:3月;培训费用:23800元
学员毕业后初期年薪10万元左右
 招生服务平台始创于1999年
招生服务平台始创于1999年
 打开微信扫一扫,关注育路教育官方微信
打开微信扫一扫,关注育路教育官方微信

1999-2025 北京育路互联科技有限公司版权所有 | 京ICP备10025267号-13 | 京公网安备 11010802025989号
报名咨询电话:136-9356-7579
工业机器人就业培训中心







